
Note
This documentation is for a development version. Click here for the latest stable release (v4.0.0).
Learning a communication channel¶
Normally, if you have a function you would like to compute across a connection, you would specify it with function=my_func in the Connection constructor. However, it is also possible to use error-driven learning to learn to compute a function online.
Step 1: Create the model without learning¶
We’ll start by creating a connection between two populations that initially computes a very weird function.
[1]:
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import nengo
from nengo.processes import WhiteSignal
from nengo.solvers import LstsqL2
[2]:
model = nengo.Network()
with model:
inp = nengo.Node(WhiteSignal(60, high=5), size_out=2)
pre = nengo.Ensemble(60, dimensions=2)
nengo.Connection(inp, pre)
post = nengo.Ensemble(60, dimensions=2)
conn = nengo.Connection(pre, post, function=lambda x: np.random.random(2))
inp_p = nengo.Probe(inp)
pre_p = nengo.Probe(pre, synapse=0.01)
post_p = nengo.Probe(post, synapse=0.01)
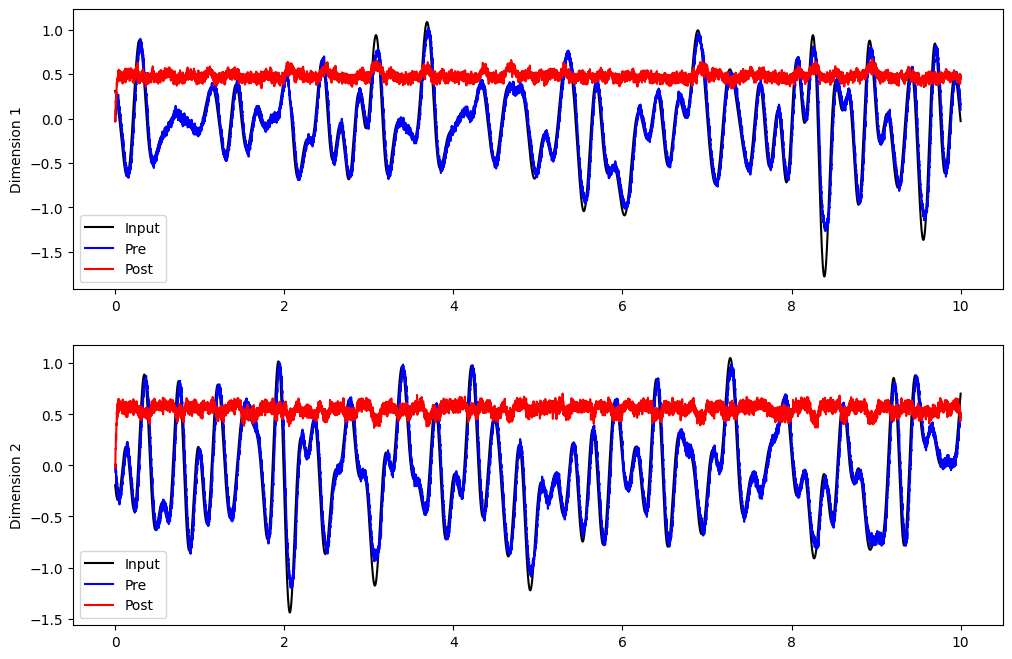
If we run this model as is, we can see that the connection from pre to post doesn’t compute much of value.
[3]:
with nengo.Simulator(model) as sim:
sim.run(10.0)
[4]:
plt.figure(figsize=(12, 8))
plt.subplot(2, 1, 1)
plt.plot(sim.trange(), sim.data[inp_p].T[0], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[0], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[0], c="r", label="Post")
plt.ylabel("Dimension 1")
plt.legend(loc="best")
plt.subplot(2, 1, 2)
plt.plot(sim.trange(), sim.data[inp_p].T[1], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[1], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[1], c="r", label="Post")
plt.ylabel("Dimension 2")
plt.legend(loc="best")
[4]:
<matplotlib.legend.Legend at 0x7f4a3c540220>
Step 2: Add in learning¶
If we can generate an error signal, then we can minimize that error signal using the nengo.PES learning rule. Since it’s a communication channel, we know the value that we want, so we can compute the error with another ensemble.
[5]:
with model:
error = nengo.Ensemble(60, dimensions=2)
error_p = nengo.Probe(error, synapse=0.03)
# Error = actual - target = post - pre
nengo.Connection(post, error)
nengo.Connection(pre, error, transform=-1)
# Add the learning rule to the connection
conn.learning_rule_type = nengo.PES()
# Connect the error into the learning rule
nengo.Connection(error, conn.learning_rule)
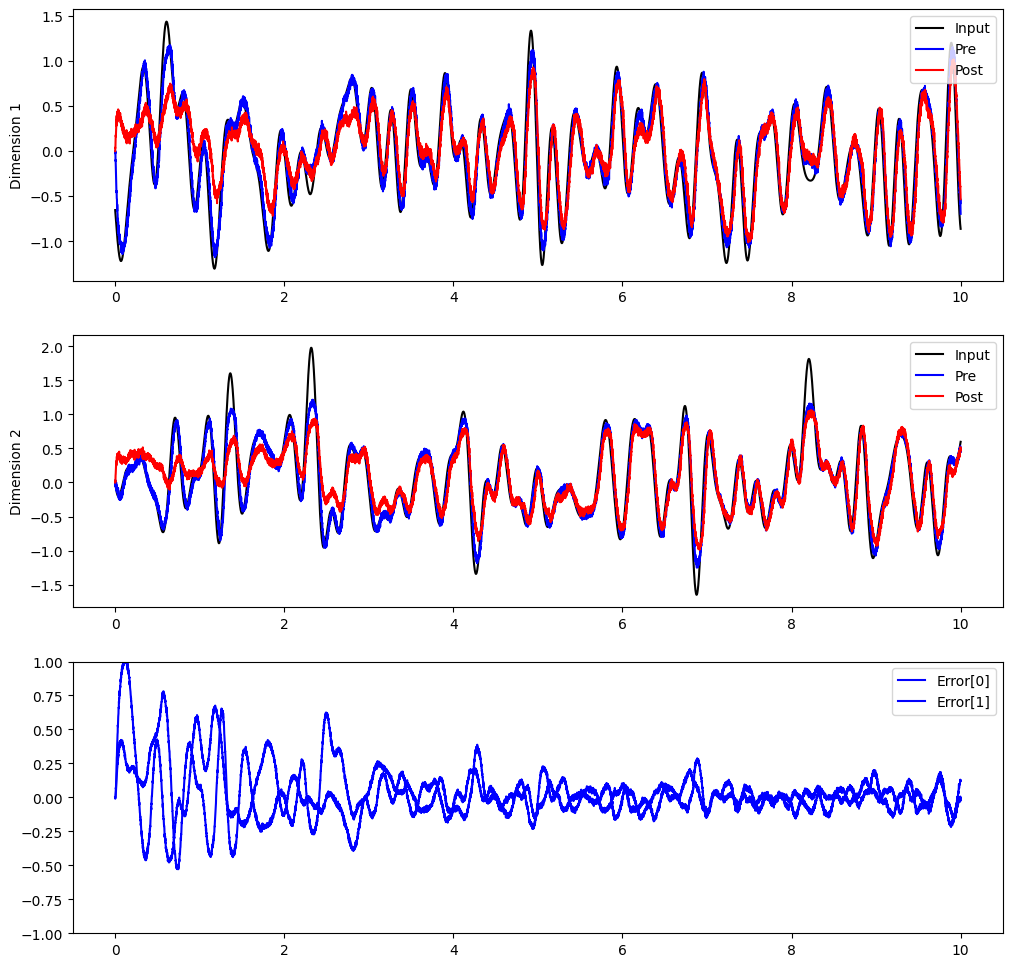
Now, we can see the post population gradually learn to compute the communication channel.
[6]:
with nengo.Simulator(model) as sim:
sim.run(10.0)
[7]:
plt.figure(figsize=(12, 12))
plt.subplot(3, 1, 1)
plt.plot(sim.trange(), sim.data[inp_p].T[0], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[0], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[0], c="r", label="Post")
plt.ylabel("Dimension 1")
plt.legend(loc="best")
plt.subplot(3, 1, 2)
plt.plot(sim.trange(), sim.data[inp_p].T[1], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[1], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[1], c="r", label="Post")
plt.ylabel("Dimension 2")
plt.legend(loc="best")
plt.subplot(3, 1, 3)
plt.plot(sim.trange(), sim.data[error_p], c="b")
plt.ylim(-1, 1)
plt.legend(("Error[0]", "Error[1]"), loc="best")
[7]:
<matplotlib.legend.Legend at 0x7f4a3c2eaf40>
Does it generalize?¶
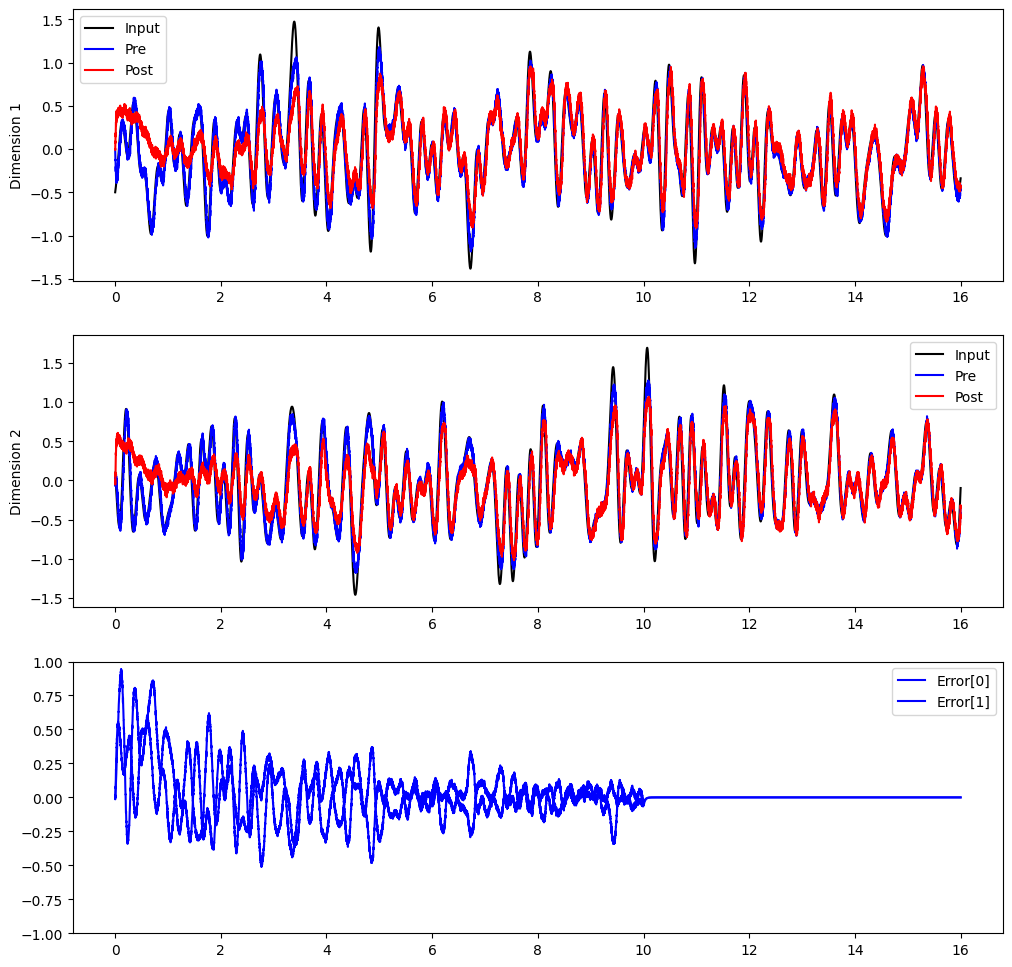
If the learning rule is always working, the error will continue to be minimized. But have we actually generalized to be able to compute the communication channel without this error signal? Let’s inhibit the error population after 10 seconds.
[8]:
def inhibit(t):
return 2.0 if t > 10.0 else 0.0
with model:
inhib = nengo.Node(inhibit)
nengo.Connection(inhib, error.neurons, transform=[[-1]] * error.n_neurons)
[9]:
with nengo.Simulator(model) as sim:
sim.run(16.0)
[10]:
plt.figure(figsize=(12, 12))
plt.subplot(3, 1, 1)
plt.plot(sim.trange(), sim.data[inp_p].T[0], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[0], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[0], c="r", label="Post")
plt.ylabel("Dimension 1")
plt.legend(loc="best")
plt.subplot(3, 1, 2)
plt.plot(sim.trange(), sim.data[inp_p].T[1], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[1], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[1], c="r", label="Post")
plt.ylabel("Dimension 2")
plt.legend(loc="best")
plt.subplot(3, 1, 3)
plt.plot(sim.trange(), sim.data[error_p], c="b")
plt.ylim(-1, 1)
plt.legend(("Error[0]", "Error[1]"), loc="best")
[10]:
<matplotlib.legend.Legend at 0x7f4a38b5c610>
How does this work?¶
The nengo.PES learning rule minimizes the same error online as the decoder solvers minimize with offline optimization.
Let \(\mathbf{E}\) be an error signal. In the communication channel case, the error signal \(\mathbf{E} = \mathbf{\hat{x}} - \mathbf{x}\); in other words, it is the difference between the decoded estimate of post, \(\mathbf{\hat{x}}\), and the decoded estimate of pre, \(\mathbf{x}\).
The PES learning rule on decoders is
where \(\mathbf{d_i}\) are the decoders being learned, \(\kappa\) is a scalar learning rate, \(n\) is the number of neurons in the pre population, and \(a_i\) is the filtered activity of the pre population.
However, many synaptic plasticity experiments result in learning rules that explain how individual connection weights change. We can multiply both sides of the equation by the encoders of the post population, \(\mathbf{e_j}\), and the gain of the post population \(\alpha_j\), as we do in Principle 2 of the NEF. This results in the learning rule
where \(\omega_{ij}\) is the connection between pre neuron \(i\) and post neuron \(j\).
The weight-based version of PES can be easily combined with learning rules that describe synaptic plasticity experiments. In Nengo, the Connection.learning_rule_type parameter accepts a list of learning rules. See Bekolay et al., 2013 for details on what happens when the PES learning rule is combined with an unsupervised learning rule.
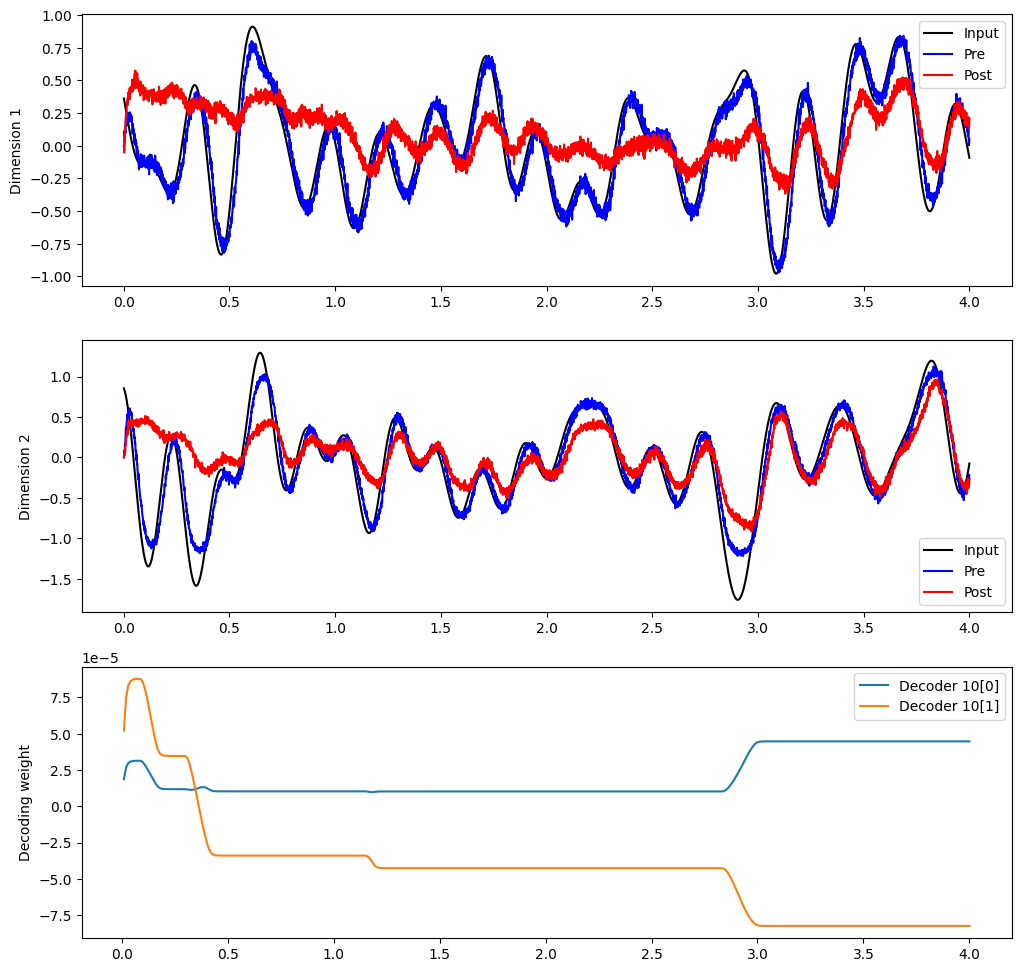
How do the decoders / weights change?¶
The equations above describe how the decoders and connection weights change as a result of the PES rule. But are there any general principles that we can say about how the rule modifies decoders and connection weights? Determining this requires analyzing the decoders and connection weights as they change over the course of a simulation.
[11]:
with model:
weights_p = nengo.Probe(conn, "weights", synapse=0.01, sample_every=0.01)
[12]:
with nengo.Simulator(model) as sim:
sim.run(4.0)
[13]:
plt.figure(figsize=(12, 12))
plt.subplot(3, 1, 1)
plt.plot(sim.trange(), sim.data[inp_p].T[0], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[0], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[0], c="r", label="Post")
plt.ylabel("Dimension 1")
plt.legend(loc="best")
plt.subplot(3, 1, 2)
plt.plot(sim.trange(), sim.data[inp_p].T[1], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[1], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[1], c="r", label="Post")
plt.ylabel("Dimension 2")
plt.legend(loc="best")
plt.subplot(3, 1, 3)
plt.plot(sim.trange(sample_every=0.01), sim.data[weights_p][..., 10])
plt.ylabel("Decoding weight")
plt.legend(("Decoder 10[0]", "Decoder 10[1]"), loc="best")
[13]:
<matplotlib.legend.Legend at 0x7f4a80745850>
[14]:
with model:
# Change the connection to use connection weights instead of decoders
conn.solver = LstsqL2(weights=True)
[15]:
with nengo.Simulator(model) as sim:
sim.run(4.0)
[16]:
plt.figure(figsize=(12, 12))
plt.subplot(3, 1, 1)
plt.plot(sim.trange(), sim.data[inp_p].T[0], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[0], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[0], c="r", label="Post")
plt.ylabel("Dimension 1")
plt.legend(loc="best")
plt.subplot(3, 1, 2)
plt.plot(sim.trange(), sim.data[inp_p].T[1], c="k", label="Input")
plt.plot(sim.trange(), sim.data[pre_p].T[1], c="b", label="Pre")
plt.plot(sim.trange(), sim.data[post_p].T[1], c="r", label="Post")
plt.ylabel("Dimension 2")
plt.legend(loc="best")
plt.subplot(3, 1, 3)
plt.plot(sim.trange(sample_every=0.01), sim.data[weights_p][..., 10])
plt.ylabel("Connection weight")
[16]:
Text(0, 0.5, 'Connection weight')
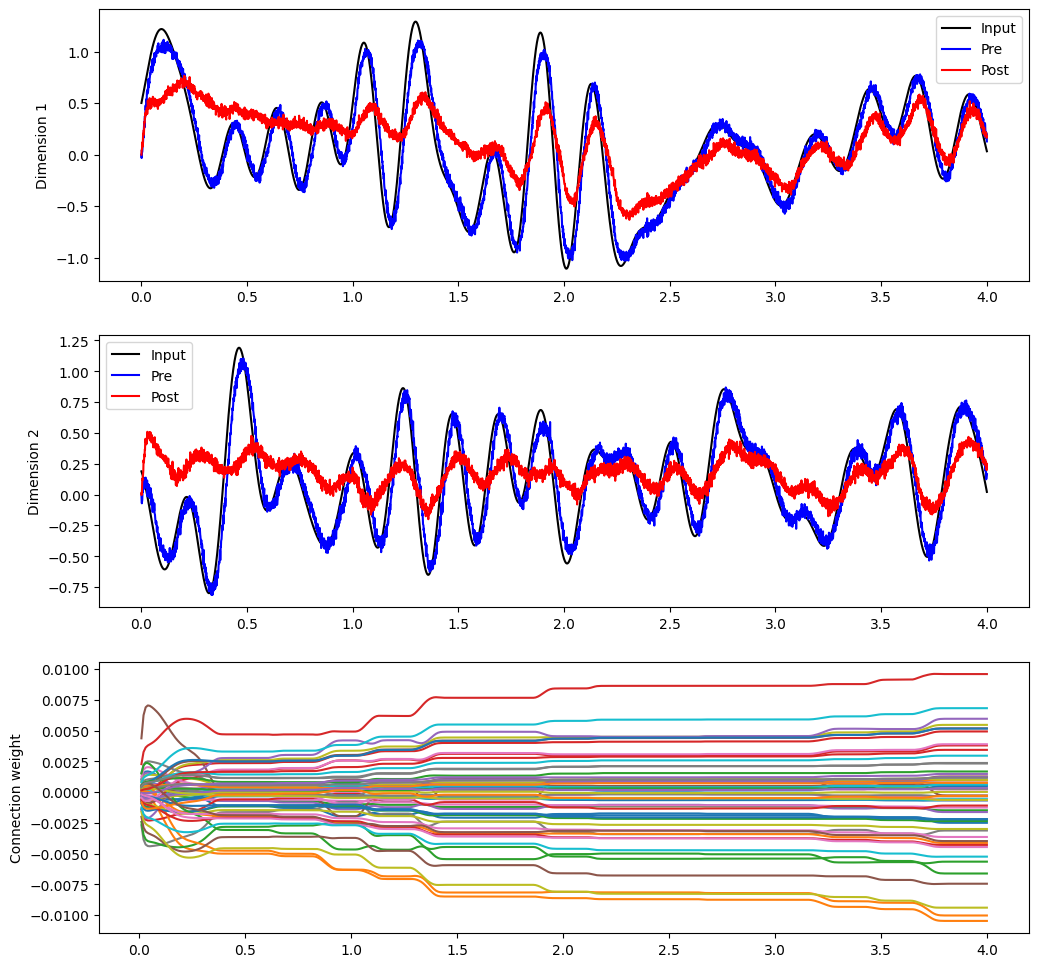
For some general principles governing how the decoders change, Voelker, 2015 and Voelker & Eliasmith, 2017 give detailed analyses of the rule’s dynamics. It’s also interesting to observe qualitative trends; often a few strong connection weights will dominate the others, while decoding weights tend to change or not change together.
What is pre_synapse?¶
By default the PES object sets pre_synapse=Lowpass(tau=0.005). This is a lowpass filter with time-constant \(\tau = 5\,\text{ms}\) that is applied to the activities of the pre-synaptic population \(a_i\) before computing each update \(\Delta {\bf d}_i\).
In general, longer time-constants smooth over the spiking activity to produce more constant updates, while shorter time-constants adapt more quickly to rapidly changing inputs. The right trade-off depends on the particular demands of the model.
This Synapse object can also be any other linear filter (as are used in the Connection object); for instance, pre_synapse=Alpha(tau=0.005) applies an alpha filter to the postsynaptic activity. This will have the effect of delaying the bulk of the activities by a rise-time of \(\tau\) before applying the update. This may be useful for situations where the error signal is delayed by the same amount, since the error signal should be synchronized with the same activities that
produced said error.