Parsing simple commands¶
This example is a simplified version of the language parsing model presented in Stewart & Eliasmith, 2013. Please refer to that paper for the high-level details.
In [1]:
# Setup for the notebook
import matplotlib.pyplot as plt
%matplotlib inline
import nengo
from nengo import spa
Step 1: Create the model¶
In [2]:
# Number of dimensions for the SPs
dimensions = 64
# Make a model object with the SPA network
model = spa.SPA(label='Parser')
with model:
# Specify the modules to be used
model.vision = spa.State(dimensions=dimensions, neurons_per_dimension=100)
model.phrase = spa.State(dimensions=dimensions, neurons_per_dimension=100)
model.motor = spa.State(dimensions=dimensions, neurons_per_dimension=100)
model.noun = spa.State(dimensions=dimensions,
neurons_per_dimension=100,
feedback=1.0)
model.verb = spa.State(dimensions=dimensions,
neurons_per_dimension=100,
feedback=1.0)
# Specify the action mapping
actions = spa.Actions(
'dot(vision, WRITE) --> verb=vision',
'dot(vision, ONE+TWO+THREE) --> noun=vision',
'0.5*(dot(NONE-WRITE-ONE-TWO-THREE, vision) '
'+ dot(phrase, WRITE*VERB)) '
'--> motor=phrase*~NOUN',
)
cortical_actions = spa.Actions(
'phrase=noun*NOUN + verb*VERB',
)
model.bg = spa.BasalGanglia(actions=actions)
model.thal = spa.Thalamus(model.bg)
model.cortical = spa.Cortical(actions=cortical_actions)
Step 2: Provide the input¶
In [3]:
def input_vision(t):
sequence = 'WRITE ONE NONE WRITE TWO NONE THREE WRITE NONE'.split()
index = int(t / 0.5) % len(sequence)
return sequence[index]
with model:
model.input = spa.Input(vision=input_vision)
Step 3: Probe the output¶
In [4]:
with model:
vision = nengo.Probe(model.vision.output, synapse=0.03)
phrase = nengo.Probe(model.phrase.output, synapse=0.03)
motor = nengo.Probe(model.motor.output, synapse=0.03)
noun = nengo.Probe(model.noun.output, synapse=0.03)
verb = nengo.Probe(model.verb.output, synapse=0.03)
actions = nengo.Probe(model.thal.actions.output, synapse=0.01)
utility = nengo.Probe(model.bg.input, synapse=0.01)
Step 4: Run the model¶
In [5]:
# Create the simulator object
with nengo.Simulator(model) as sim:
# Simulate the model for 4.5 seconds
sim.run(4.5)
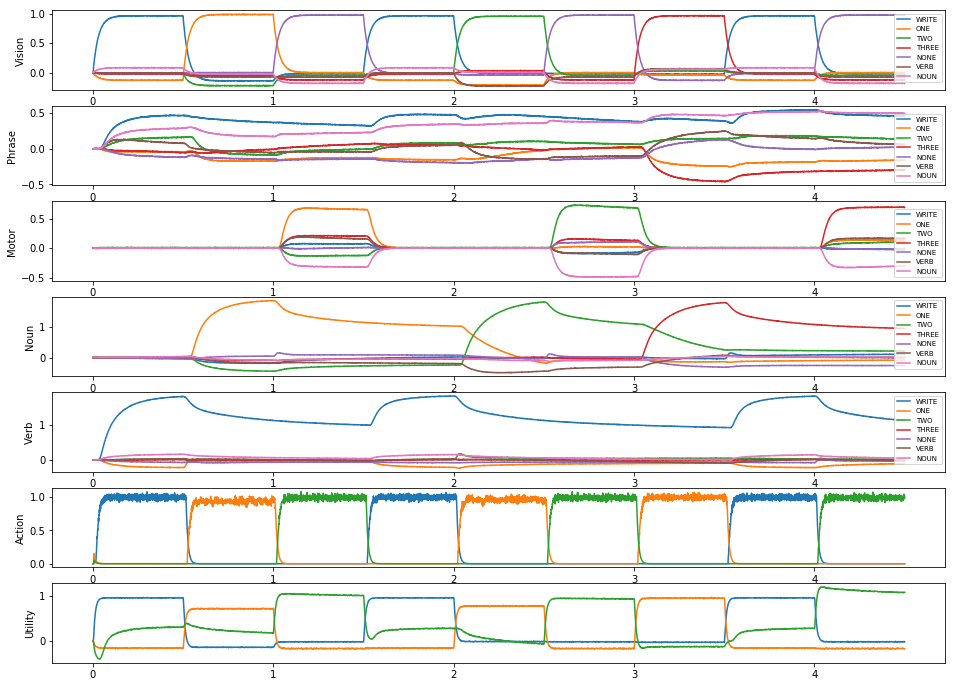
Step 5: Plot the results¶
In [6]:
fig = plt.figure(figsize=(16, 12))
p1 = fig.add_subplot(7, 1, 1)
p1.plot(sim.trange(), model.similarity(sim.data, vision))
p1.legend(model.get_output_vocab('vision').keys, fontsize='x-small')
p1.set_ylabel('Vision')
p2 = fig.add_subplot(7, 1, 2)
p2.plot(sim.trange(), model.similarity(sim.data, phrase))
p2.legend(model.get_output_vocab('phrase').keys, fontsize='x-small')
p2.set_ylabel('Phrase')
p3 = fig.add_subplot(7, 1, 3)
p3.plot(sim.trange(), model.similarity(sim.data, motor))
p3.legend(model.get_output_vocab('motor').keys, fontsize='x-small')
p3.set_ylabel('Motor')
p4 = fig.add_subplot(7, 1, 4)
p4.plot(sim.trange(), model.similarity(sim.data, noun))
p4.legend(model.get_output_vocab('noun').keys, fontsize='x-small')
p4.set_ylabel('Noun')
p5 = fig.add_subplot(7, 1, 5)
p5.plot(sim.trange(), model.similarity(sim.data, verb))
p5.legend(model.get_output_vocab('verb').keys, fontsize='x-small')
p5.set_ylabel('Verb')
p6 = fig.add_subplot(7, 1, 6)
p6.plot(sim.trange(), sim.data[actions])
p6.set_ylabel('Action')
p7 = fig.add_subplot(7, 1, 7)
p7.plot(sim.trange(), sim.data[utility])
p7.set_ylabel('Utility')
fig.subplots_adjust(hspace=0.2)