
- Overview
- Installation
- Configuration
- Example models
- Communication channel
- Integrator
- Multidimensional integrator
- Simple oscillator
- Nonlinear oscillator
- Neuron to neuron connections
- PES learning
- Keyword spotting
- MNIST convolutional network
- CIFAR-10 convolutional network
- Converting a Keras model to an SNN on Loihi
- Nonlinear adaptive control
- Legendre Memory Units on Loihi
- DVS from file
- API reference
- Tips and tricks
- Hardware setup
Legendre Memory Units on Loihi¶
Legendre Memory Units (LMUs) are a novel recurrent neural network architecture, described in Voelker, Kajić, and Eliasmith (NeurIPS 2019). We will not go into much of the underlying details of these methods here; broadly speaking, we can think of an LMU as a recurrent network that does a very good job of representing the temporal information in some input signal. Since most RNN tasks involve computing some function of that temporal information, the better the RNN is at representing the temporal information the better it will be able to perform the task. See the paper for all the details!
In this example we will show how an LMU can be used to delay an input signal for some fixed length of time. This is a simple sounding task, but performing an accurate delay requires the network to store the complete history of the input signal across the delay period. So it is a good measure of a network’s fundamental temporal storage.
Note that this example is essentially the same as the “LMUs in Nengo” example, except that here we use Loihi to simulate the network. The main difference is that we use an EnsembleArray to implement the LMU cell in spiking neurons, rather than using a linear nengo.Node.
[1]:
%matplotlib inline
from collections import deque
import matplotlib.pyplot as plt
import numpy as np
import nengo
import nengo_loihi
Our LMU in this example will have two parameters: the length of the time window it is optimized to store, and the number of Legendre polynomials used to represent the signal (using higher order polynomials allows the LMU to represent higher frequency information).
The input will be a band-limited white noise signal, which has its own parameters determining the amplitude and frequency of the signal.
Feel free to adjust any of these parameters to see what impact they have on the model’s performance.
[2]:
# parameters of LMU
theta = 1.0 # length of window (in seconds)
order = 6 # number of Legendre polynomials representing window
# parameters of input signal
freq = 2 # frequency limit
rms = 0.30 # amplitude of input (set to keep within [-1, 1])
delay = 0.5 # length of time delay network will learn
# simulation parameters
dt = 0.001 # simulation timestep
sim_t = 30 # length of simulation
seed = 10 # fixed for deterministic results
Next we need to compute the analytically derived weight matrices used in the LMU. These are determined statically based on the theta/order parameters from above. It is also possible to optimize these parameters using backpropagation, using a framework such as NengoDL.
[3]:
# compute the A and B matrices according to the LMU's mathematical derivation
# (see the paper for details)
Q = np.arange(order, dtype=np.float64)
R = (2 * Q + 1)[:, None] / theta
j, i = np.meshgrid(Q, Q)
A = np.where(i < j, -1, (-1.0) ** (i - j + 1)) * R
B = (-1.0) ** Q[:, None] * R
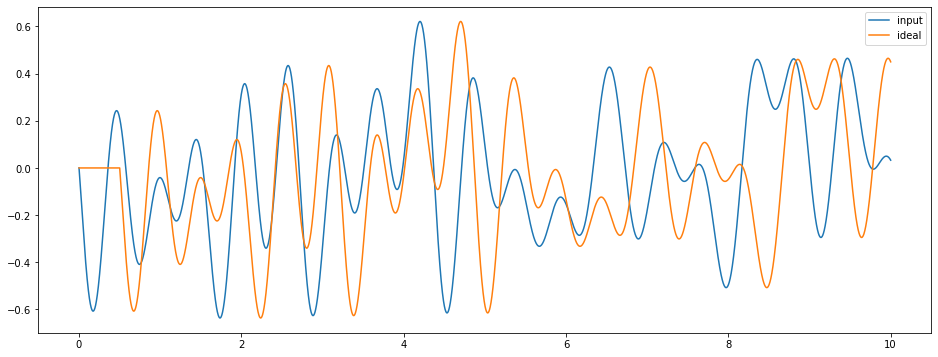
Next we will set up an artificial synapse model to compute an ideal delay (we’ll use this to train the model later on). And we can run a simple network containing just our input signal and the ideal delay to see what that looks like.
Note that this artificial synapse model will not run on Loihi, it is run on the superhost and the information is communicated to Loihi on each timestep.
[4]:
class IdealDelay(nengo.synapses.Synapse):
def __init__(self, delay):
super().__init__()
self.delay = delay
def make_state(self, *args, **kwargs): # pylint: disable=signature-differs
return {}
def make_step(self, shape_in, shape_out, dt, rng, state):
# buffer the input signal based on the delay length
buffer = deque([0] * int(self.delay / dt))
def delay_func(t, x):
buffer.append(x.copy())
return buffer.popleft()
return delay_func
with nengo.Network(seed=seed) as net:
# create the input signal
stim = nengo.Node(
output=nengo.processes.WhiteSignal(
high=freq, period=sim_t, rms=rms, y0=0, seed=seed
)
)
# probe input signal and an ideally delayed version of input signal
p_stim = nengo.Probe(stim)
p_ideal = nengo.Probe(stim, synapse=IdealDelay(delay))
# run the network (on the superhost) and display results
with nengo.Simulator(net) as sim:
sim.run(10)
plt.figure(figsize=(16, 6))
plt.plot(sim.trange(), sim.data[p_stim], label="input")
plt.plot(sim.trange(), sim.data[p_ideal], label="ideal")
plt.legend()
Now we are ready to build the LMU. The full LMU architecture consists of two components: a linear memory, and a nonlinear hidden state. But the nonlinear hidden state is really only useful when it is optimized using backpropagation (see this example in NengoDL). So here we will just build the linear memory component.
In order to implement the linear system using spiking neurons we will use 100 neurons to represent each dimension of the system. We can think of each 100 neuron group as a noisy approximation of a linear element. This approach can be implemented relatively straightforwardly using nengo.networks.EnsembleArray.
[5]:
with net:
nengo_loihi.set_defaults()
lmu = nengo.networks.EnsembleArray(
n_neurons=100, n_ensembles=order, neuron_type=nengo.SpikingRectifiedLinear()
)
tau = 0.1 # synaptic filter on LMU connections
nengo.Connection(stim, lmu.input, transform=B * tau, synapse=tau)
nengo.Connection(
lmu.output, lmu.input, transform=A * tau + np.eye(order), synapse=tau
)
On its own the LMU isn’t performing a task, it is just internally representing the input signal. So to get this network to perform a function, we will add an output Ensemble that gets the output of the LMU as input. Then we will train the output weights of that Ensemble using the PES online learning rule. The error signal will be based on the ideally delayed input signal, so the network should learn to compute that same delay.
[6]:
with net:
ens = nengo.Ensemble(1000, order, neuron_type=nengo.SpikingRectifiedLinear())
nengo.Connection(lmu.output, ens)
out = nengo.Node(size_in=1)
# we'll use a Node to compute the error signal so that we can shut off
# learning after a while (in order to assess the network's generalization)
err_node = nengo.Node(lambda t, x: x if t < sim_t * 0.8 else 0, size_in=1)
# the target signal is the ideally delayed version of the input signal,
# which is subtracted from the ensemble's output in order to compute the
# PES error
nengo.Connection(stim, err_node, synapse=IdealDelay(delay), transform=-1)
nengo.Connection(out, err_node, synapse=None)
learn_conn = nengo.Connection(
ens, out, function=lambda x: 0, learning_rule_type=nengo.PES(5e-4)
)
nengo.Connection(err_node, learn_conn.learning_rule, synapse=None)
p_out = nengo.Probe(out)
Finally, we can run the full model on Loihi to see it learning to perform the delay task.
[7]:
model = nengo_loihi.builder.Model(dt=dt)
model.pes_error_scale = 200.0
with nengo_loihi.Simulator(net, model=model) as sim:
sim.run(sim_t)
# we'll break up the output into multiple plots, just for
# display purposes
t_per_plot = 6
for i in range(sim_t // t_per_plot):
plot_slice = (sim.trange() >= t_per_plot * i) & (
sim.trange() < t_per_plot * (i + 1)
)
plt.figure(figsize=(16, 6))
plt.plot(sim.trange()[plot_slice], sim.data[p_stim][plot_slice], label="input")
plt.plot(sim.trange()[plot_slice], sim.data[p_ideal][plot_slice], label="ideal")
plt.plot(sim.trange()[plot_slice], sim.data[p_out][plot_slice], label="output")
if i * t_per_plot < sim_t * 0.8:
plt.title("Learning ON")
else:
plt.title("Learning OFF")
plt.ylim([-1, 1])
plt.legend()
/home/travis/build/nengo/nengo-loihi/nengo_loihi/builder/discretize.py:477: UserWarning: Lost 3 extra bits in weight rounding
warnings.warn("Lost %d extra bits in weight rounding" % (-s2,))
/home/travis/build/nengo/nengo-loihi/nengo_loihi/builder/discretize.py:477: UserWarning: Lost 2 extra bits in weight rounding
warnings.warn("Lost %d extra bits in weight rounding" % (-s2,))
/home/travis/build/nengo/nengo-loihi/nengo_loihi/builder/discretize.py:477: UserWarning: Lost 4 extra bits in weight rounding
warnings.warn("Lost %d extra bits in weight rounding" % (-s2,))
/home/travis/build/nengo/nengo-loihi/nengo_loihi/builder/discretize.py:477: UserWarning: Lost 5 extra bits in weight rounding
warnings.warn("Lost %d extra bits in weight rounding" % (-s2,))
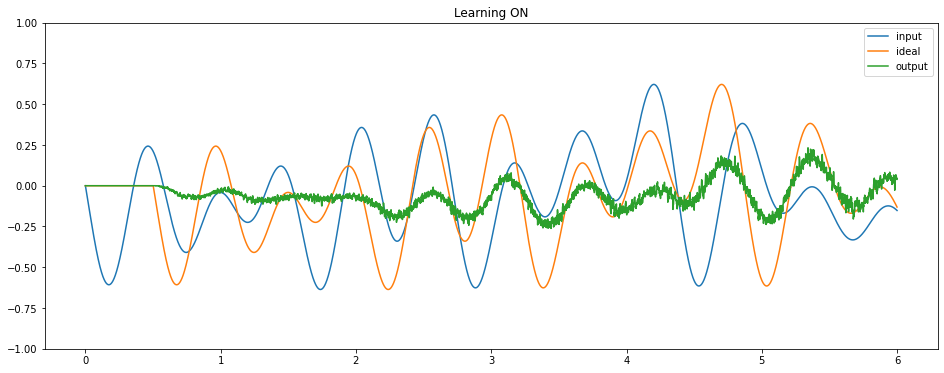
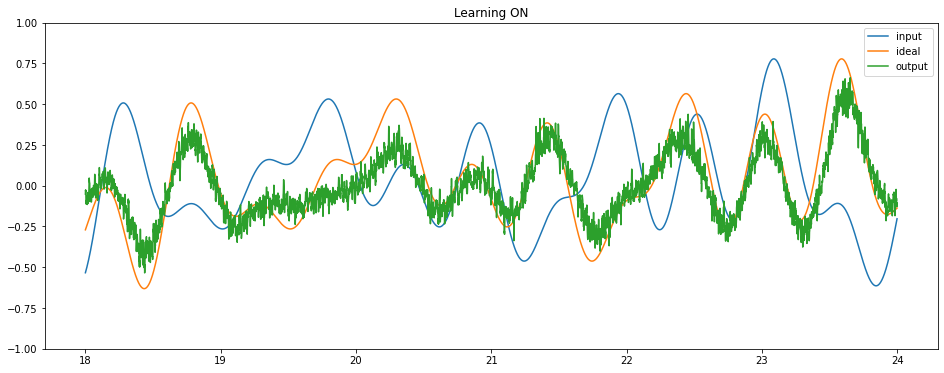
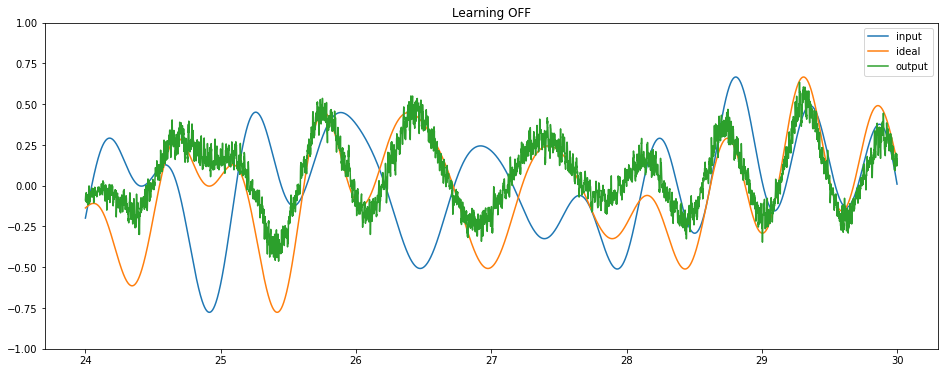
We can see that the network is successfully learning to compute a delay. We could use these same principles to train a network to compute any time-varying function of some input signal, and an LMU will always provide an optimal representation of that input signal.
See these other examples for some other applications of LMUs:
As well as the original paper for more information on LMUs.